工业机器人技术基础:工业机器人概述
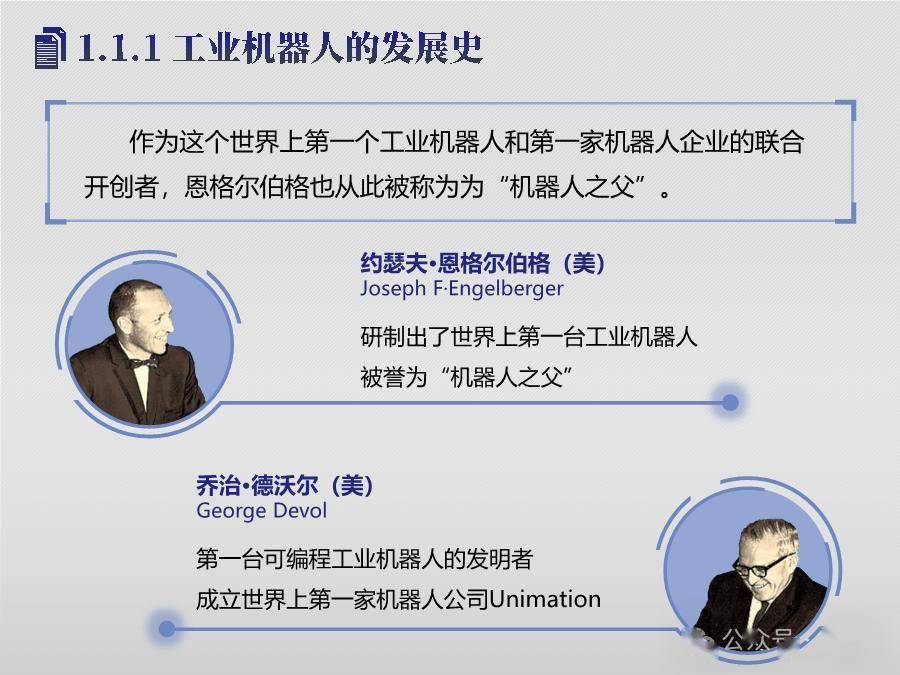
在发展史部分,“robot”源自捷克语“robota”(意为奴隶劳动),1920年首现于捷克剧作家作品;1950年代,美国的约瑟夫·恩格尔伯格和乔治·德沃尔造出世界第一台工业机器人Unimate(用于压铸的五轴液压驱动机器人),恩格尔伯格也被称“机器人之父”。
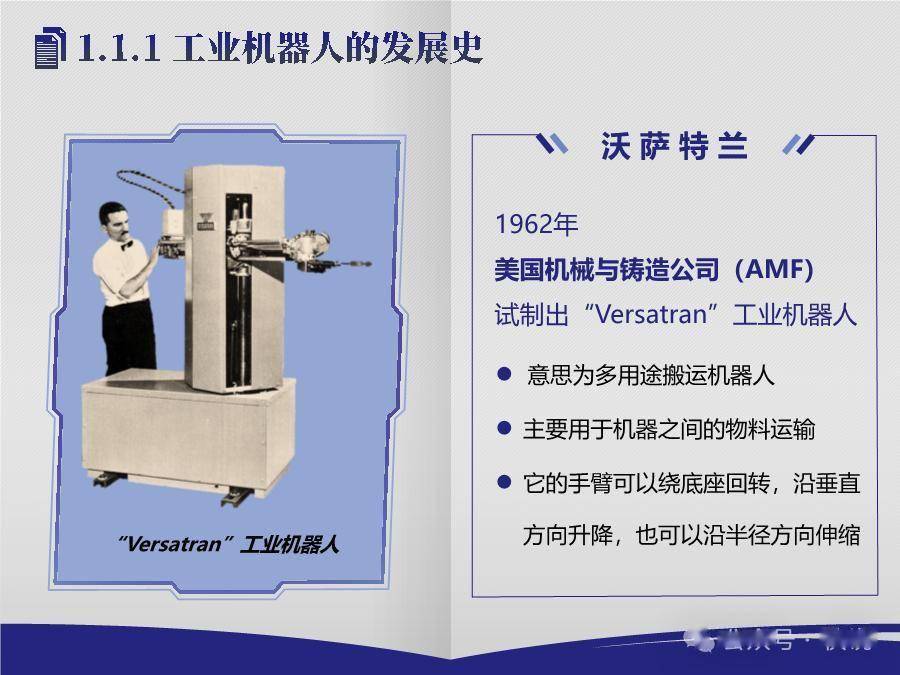
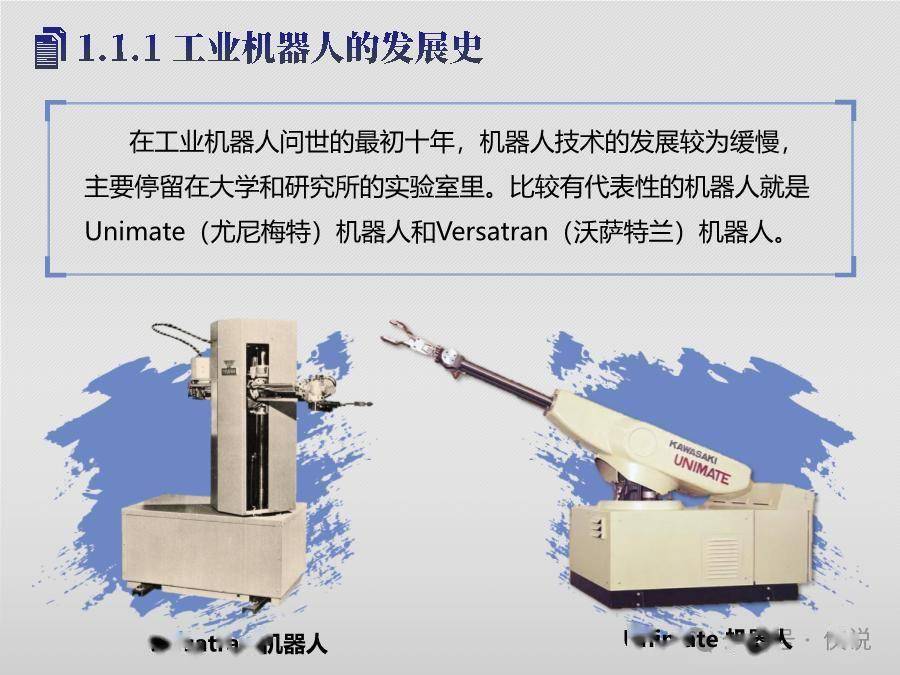
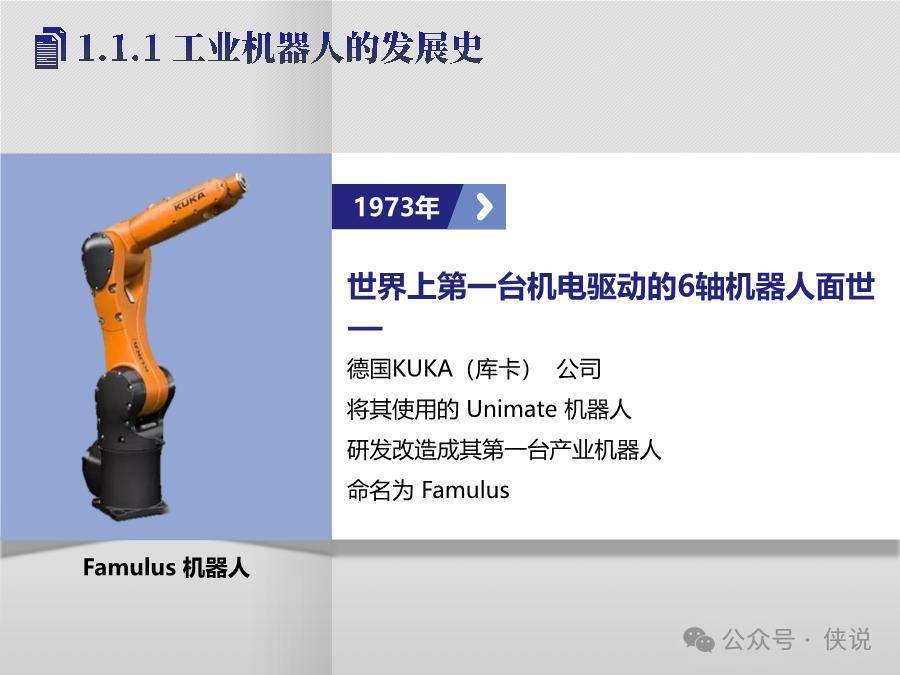
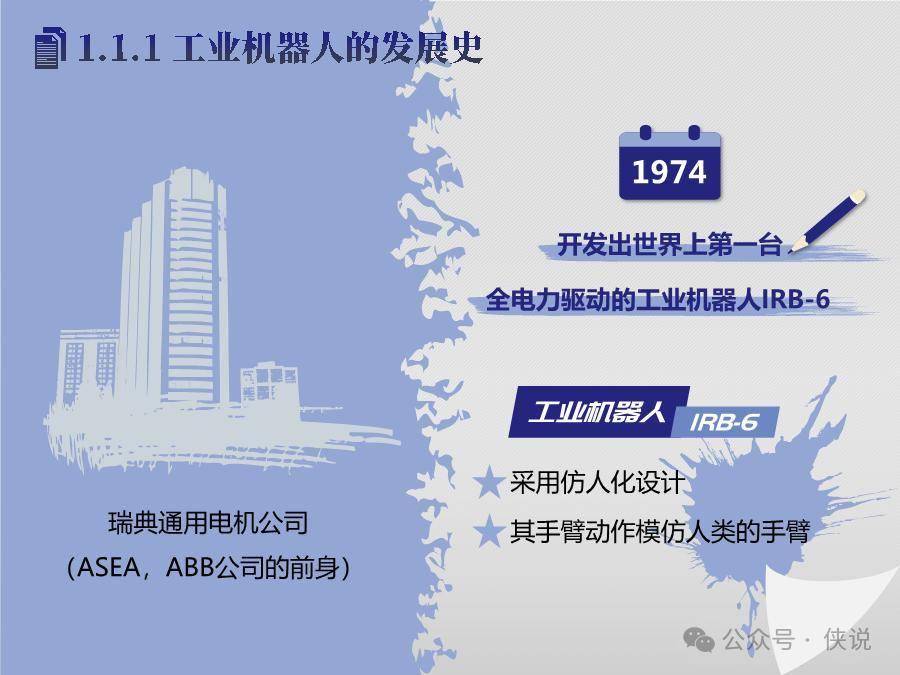
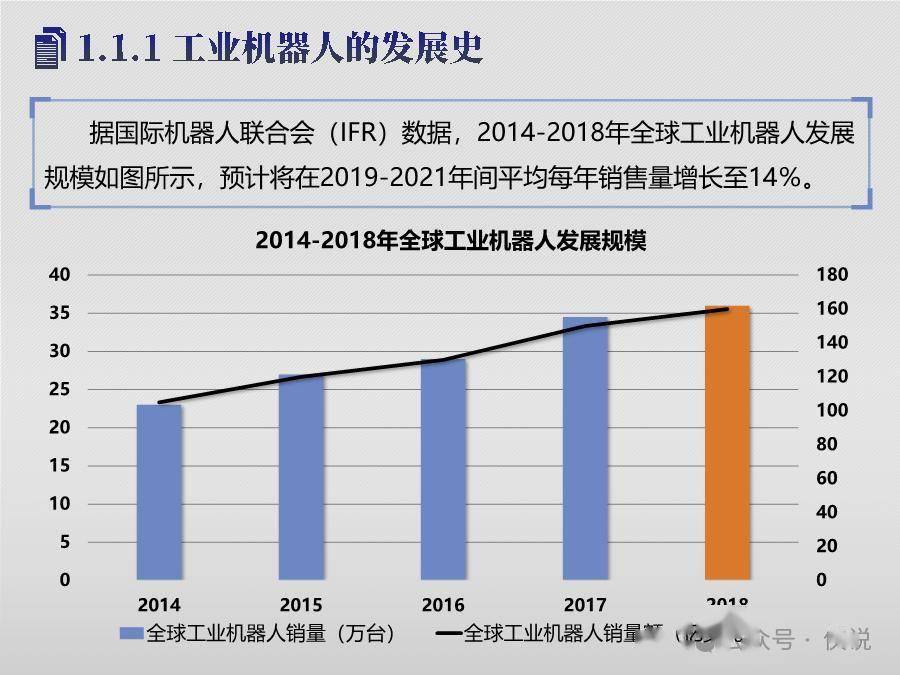
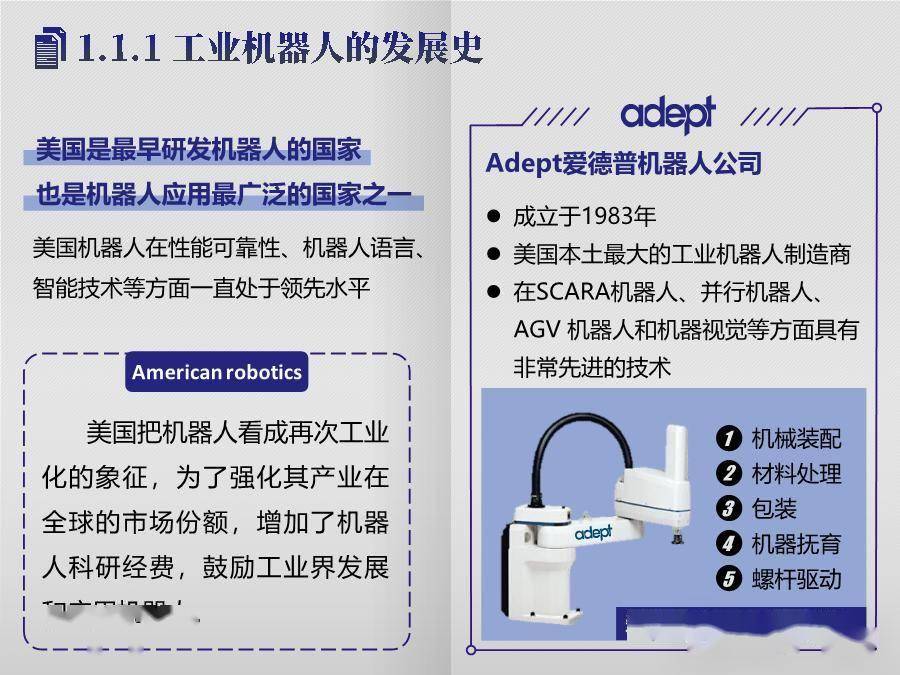
之后发展分阶段:最初十年技术缓慢,停留在实验室;1970年代随多技术发展进入实用化时代,出现PUMA系列、SCARA机器人等;后续有低谷也有复苏,2014 - 2018年全球销量增长,预计2019 - 2021年销量年均增14%。各国发展各有特点,美国在性能、智能技术等领先,日本后来居上成“机器人王国”,德国依托“工业4.0”需求增长,中国分理论研究、样机研发等阶段逐步发展。
定义方面,因技术发展,工业机器人定义尚未确定,但有特定机械机构、通用性、不同程度智能、独立性四个显著特点。分类方式多样,按坐标特性可分直角坐标、柱面坐标等类型;按控制方式分非伺服控制和伺服控制;还可按拓扑结构、智能程度、驱动类型、作业任务分类,且每种分类下的机器人各有特点和适用场景。
基本组成上,工业机器人由机器人本体(操作机,含机械臂、驱动与传动装置、传感器)、控制器与控制系统、示教器三部分构成。主要参数包括自由度(表示灵活程度,一般3 - 6个)、定位精度和重复定位精度(衡量位置准确性)、分辨率(关节最小移动距离或转动角度)、工作范围(末端可达点集合)、最大运动速度(影响效率)、承载能力(工作时能承受的最大质量)。
最后提到工业机器人已广泛应用于多高新产业,未来发展趋势集中在智能化(提升检测和判断功能)、协作控制(优化人机及多设备集成)、标准化和模块化(降本提效)、机构新构型(适应复杂作业)四个方面。
报告目录:
第一章 工业机器人概述
1.1 工业机器人的发展史和定义
1.1.1 工业机器人的发展史
1.1.2 工业机器人的定义
1.2 工业机器人分类
1.2.1 按工业机器人的坐标特性分类
1.2.2 按工业机器人的控制方式分类
1.2.3 按工业机器人的拓扑结构分类
1.2.4 按工业机器人的智能程度分类
1.2.5 按工业机器人的驱动类型分类
1.2.6 按工业机器人的作业任务分类
1.3 工业机器人的基本组成与参数
1.3.1 工业机器人的组成
1.3.2 工业机器人的主要参数
1.4 工业机器人的发展
报告预览如下(末尾下载通道):