大模型时代的具身智能(212页)
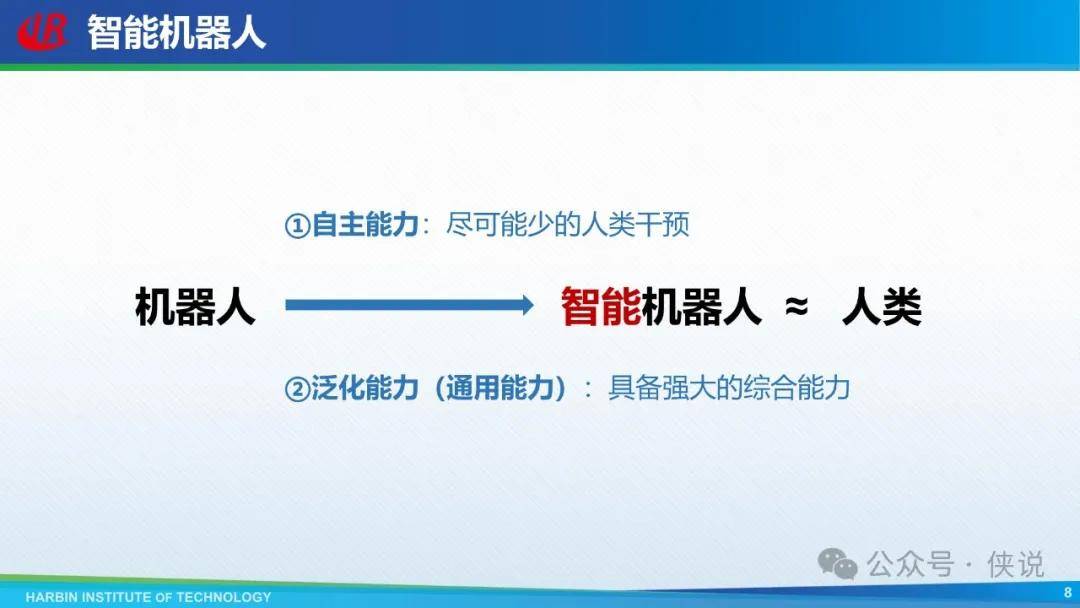
在大模型时代背景下,具身智能成为了人工智能领域极具前景的研究方向。具身智能强调智能体和物理世界的紧密交互,它赋予机器人等智能设备更像人类一样的感知和行动能力。
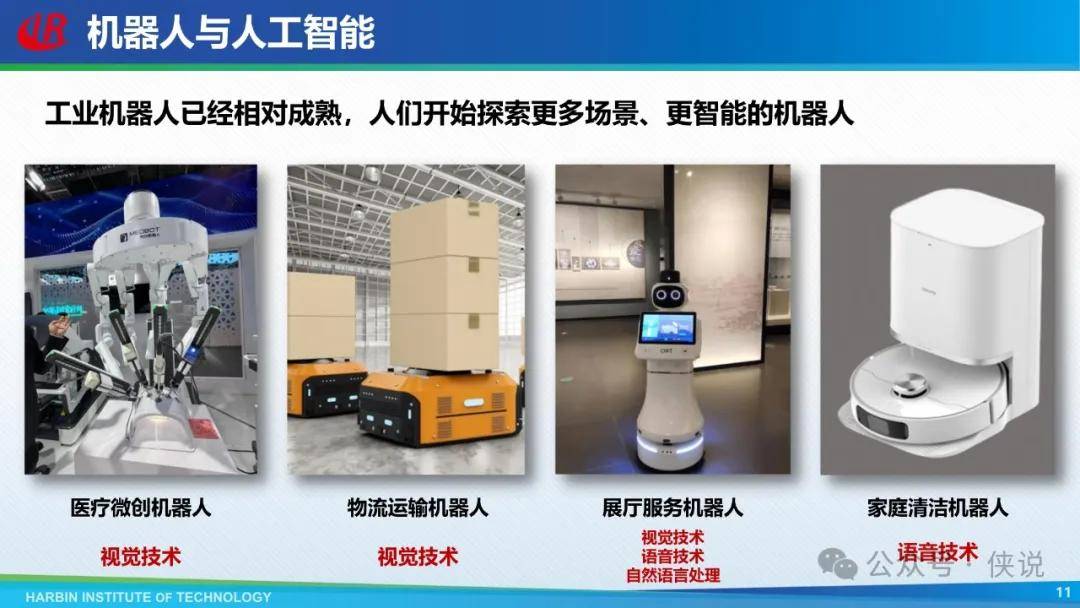
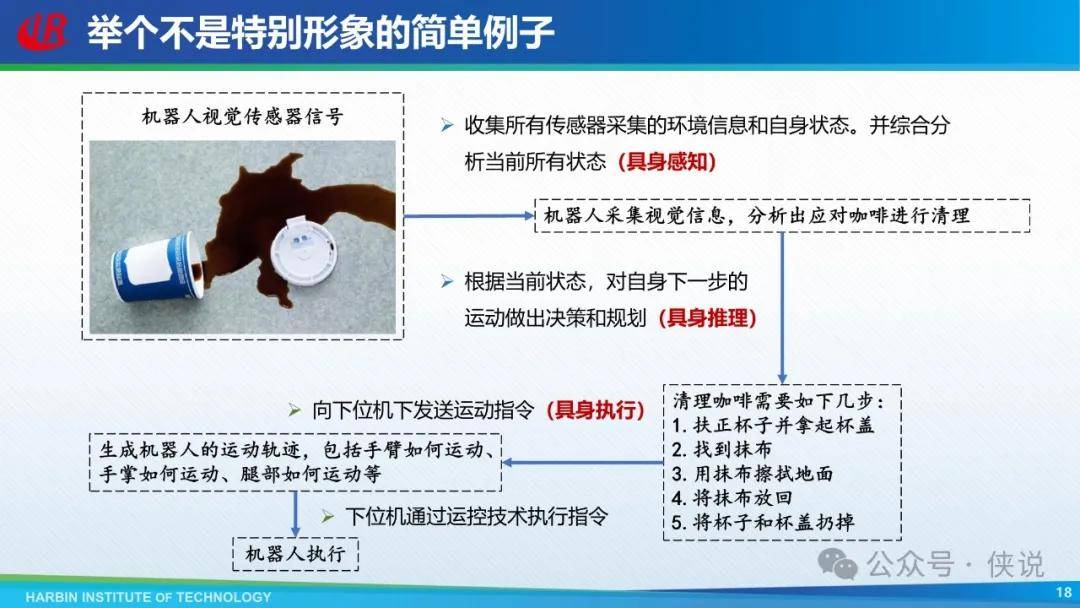
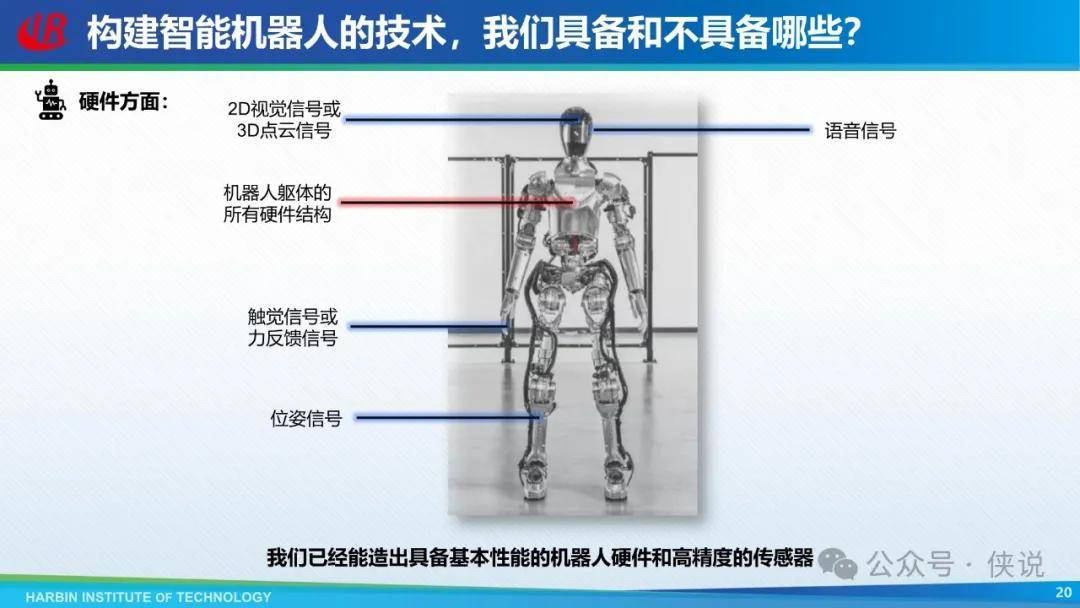
从感知层面,通过各种先进的传感器,智能体能实时捕捉周围环境的视觉、听觉、触觉等信息,就像人类的五官一样,对环境有全方位的感知,例如在复杂的工厂车间,能精准识别机器设备的运行状态、物料的位置等细节信息。
在决策和行动方面,借助强大的大模型算力,智能体可以依据感知到的信息迅速做出合理决策,规划出最优行动路径,并且控制肢体精准执行动作,完成诸如抓取、搬运、装配等复杂任务。
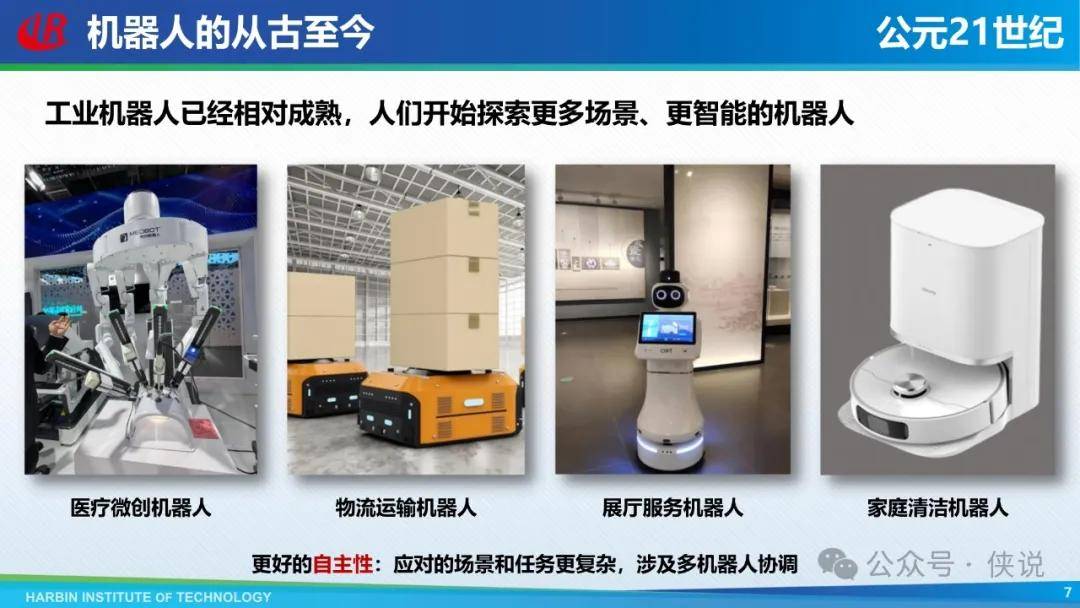
具身智能的发展将极大地拓展人工智能的应用场景,从工业生产自动化到家庭服务机器人,再到复杂危险环境的探测与作业等,都能看到它的身影,它有望重塑众多行业的工作模式和生活方式,不过目前在技术落地过程中,仍面临诸如模型优化以适应不同硬件条件、提升智能体在复杂多变环境下的稳定性和适应性等诸多技术难题,但随着科研投入的加大和跨学科合作的深化,这些问题有望逐步攻克,具身智能未来可期。
报告预览如下(末尾下载通道):