智能汽车行业专题研究-大模型应用下自动驾驶赛道将有哪些变化?
BEV+Transformer已经成为自动驾驶算法主流趋势
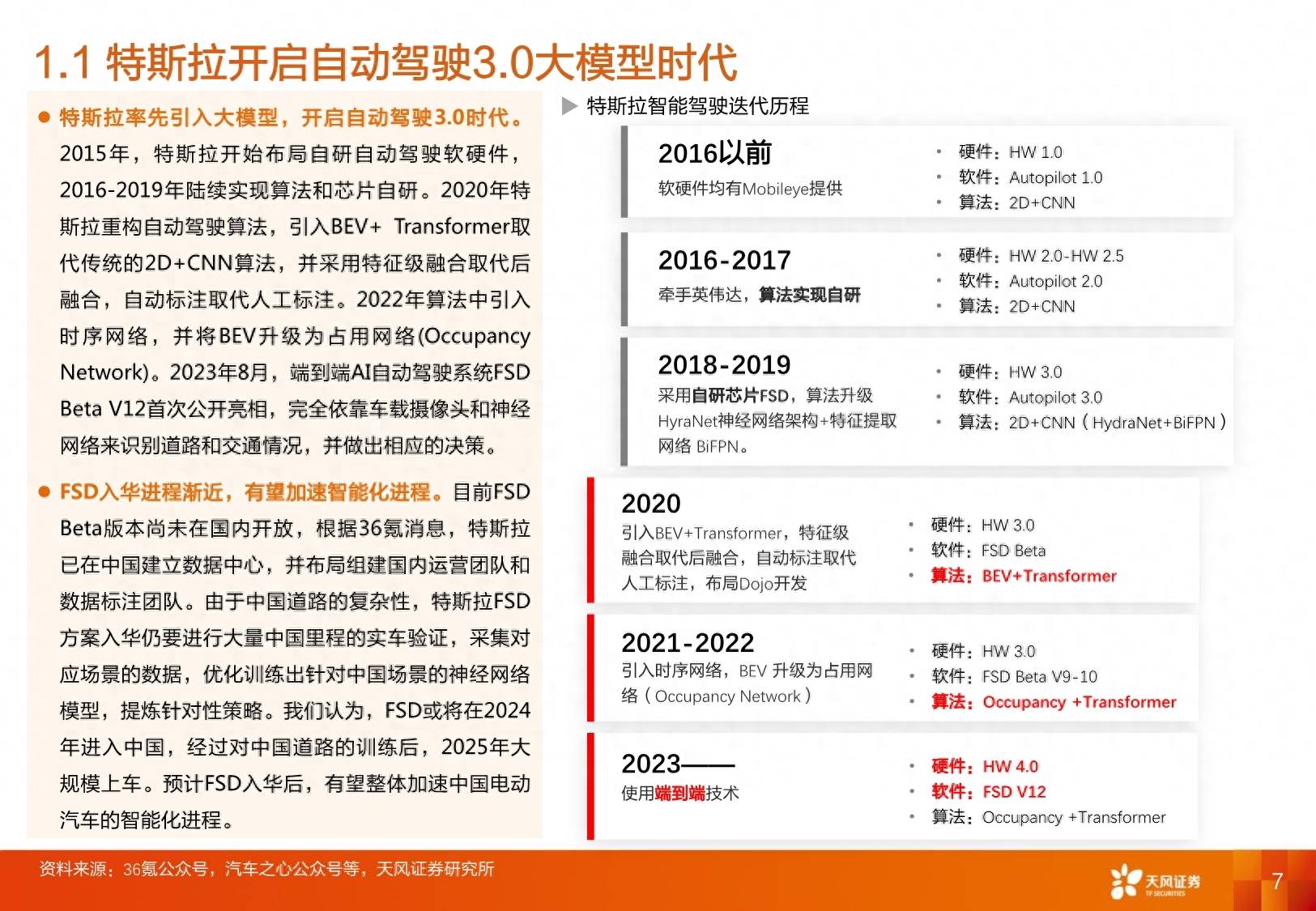
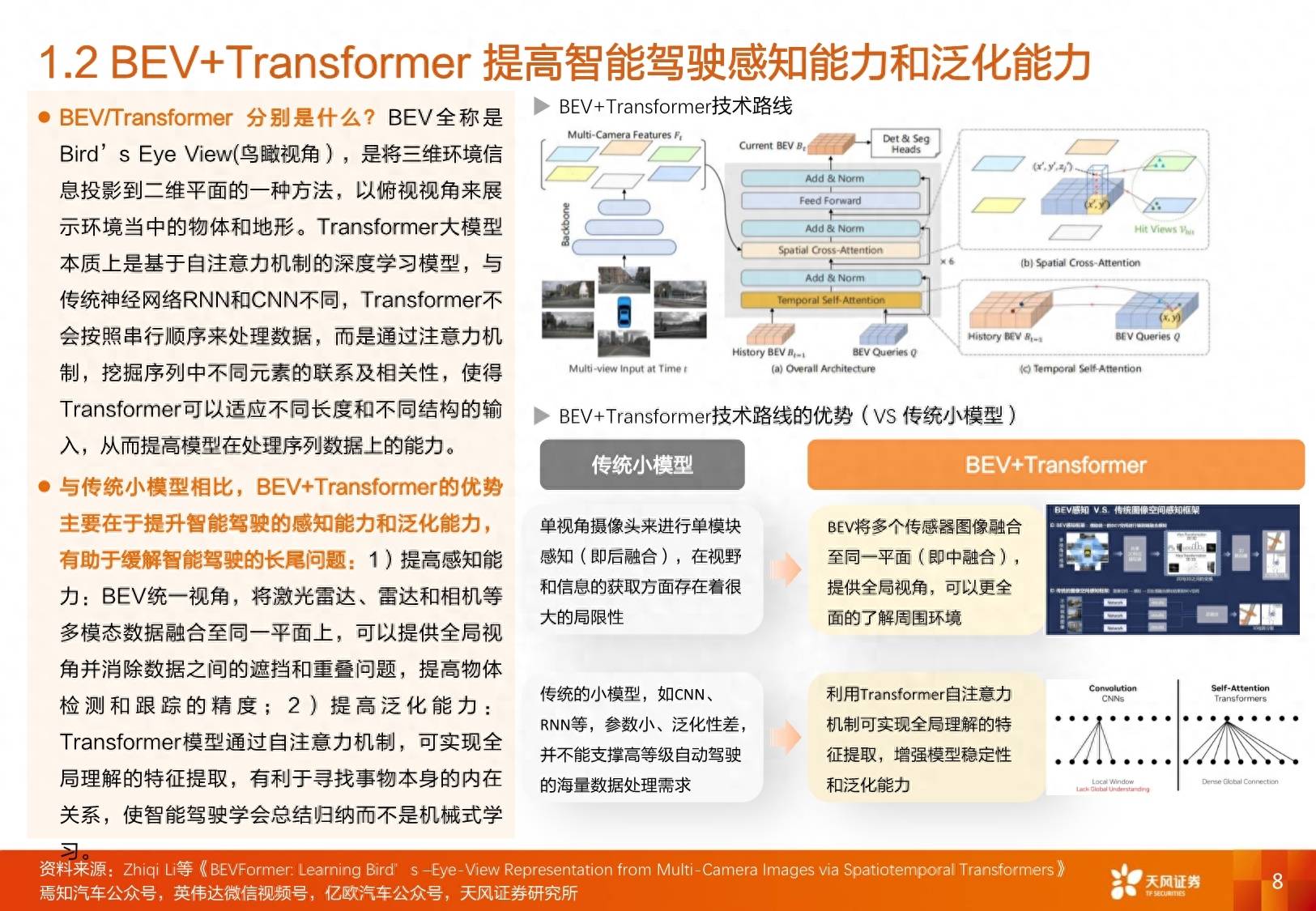
特斯拉率先引入BEV+Tranformer大模型,与传统2D+CNN小模型相比,大模型的优势主要在于:
1)提高感知能力:BEV将激光雷 达、雷达和相机等多模态数据融合在同一平面上,可以提供全局视角并消除数据之间的遮挡和重叠问题,提高物体检测和跟踪的 精度;
2)提高泛化能力:Transformer模型提取特征函数,通过注意力机制寻找事物本身的内在关系,使智能驾驶学会总结归纳 而不是机械式学习。主流车企及自动驾驶企业均已布局BEV+Transformer,大模型成为自动驾驶算法的主流趋势。
大模型应用下NOA快速落地,L3及以上自动驾驶进程有望加快
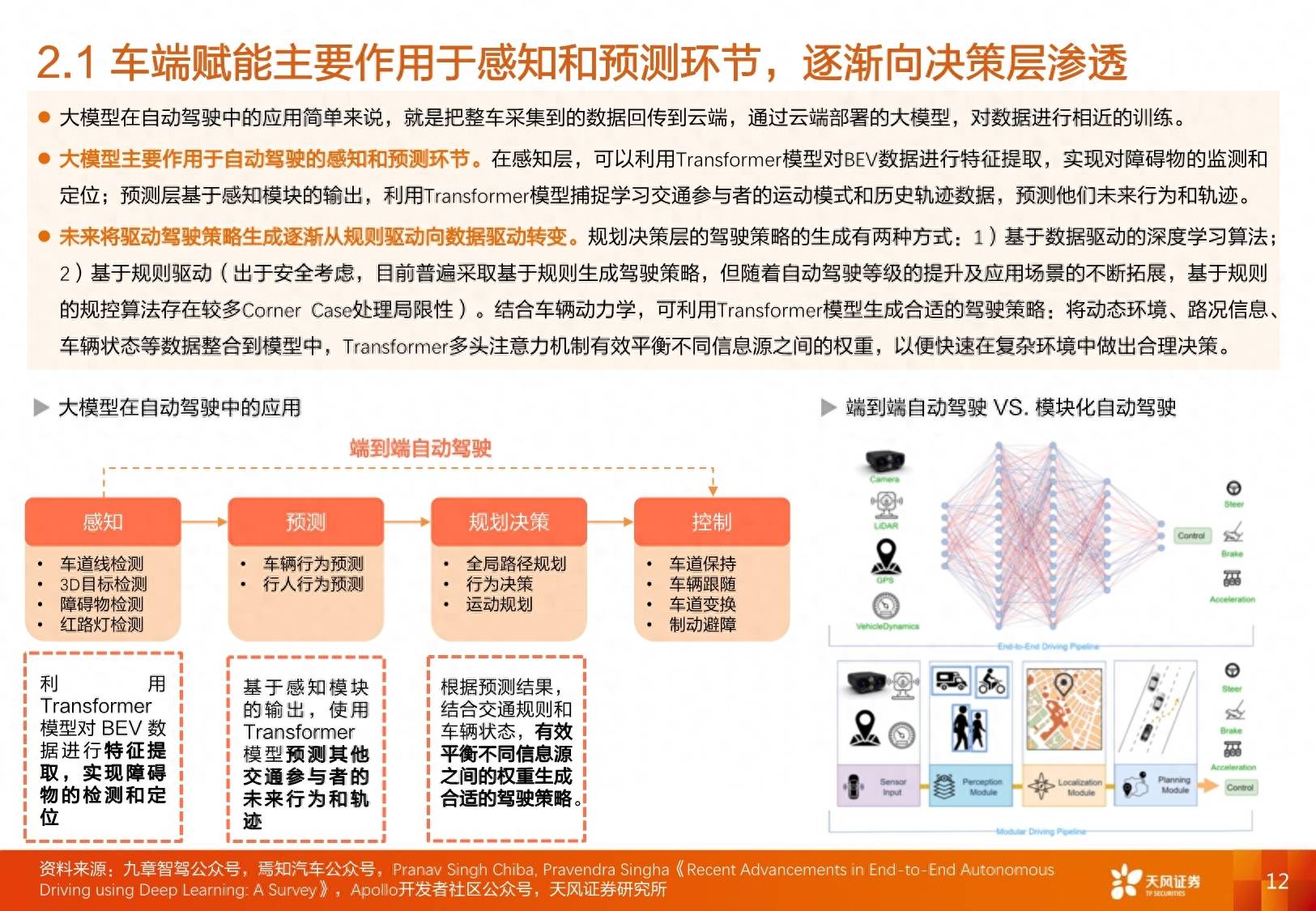
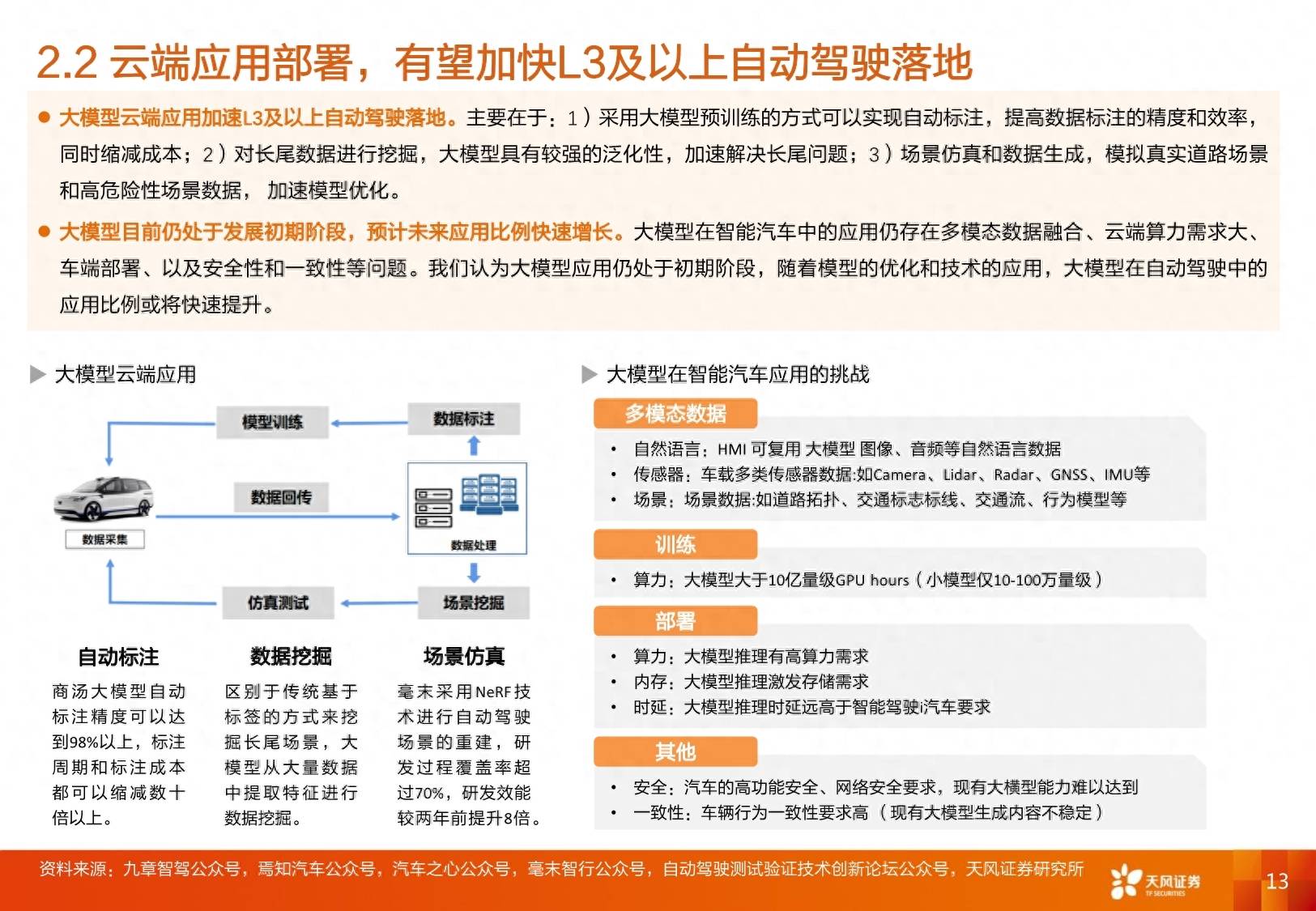
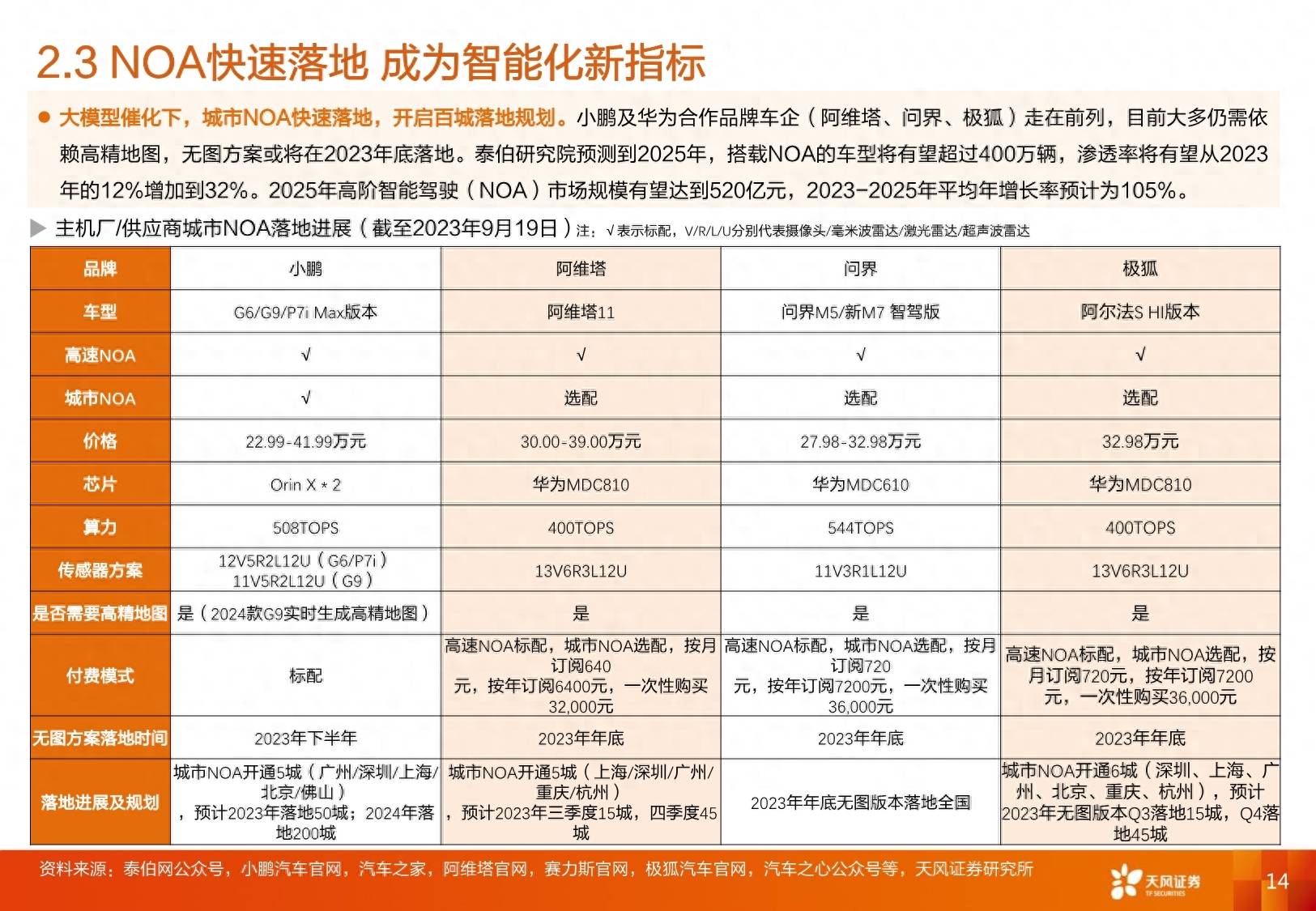
在车端大模型可赋能自动驾驶的感知和预测环节,并逐渐向决策层渗透,驾驶策略或将从规则驱动向数据驱动转变。在云端大模 型通过实现自动标、数据挖掘、仿真场景生成,提高自动驾驶迭代效率和速度。大模型催化下,高速NOA、通勤NOA、城市NOA 等功能快速上车,同时有望加快L3及以上自动驾驶落地进程。
大模型将带来云端算力、车端算力、感知端、执行端以及商业模式的变化
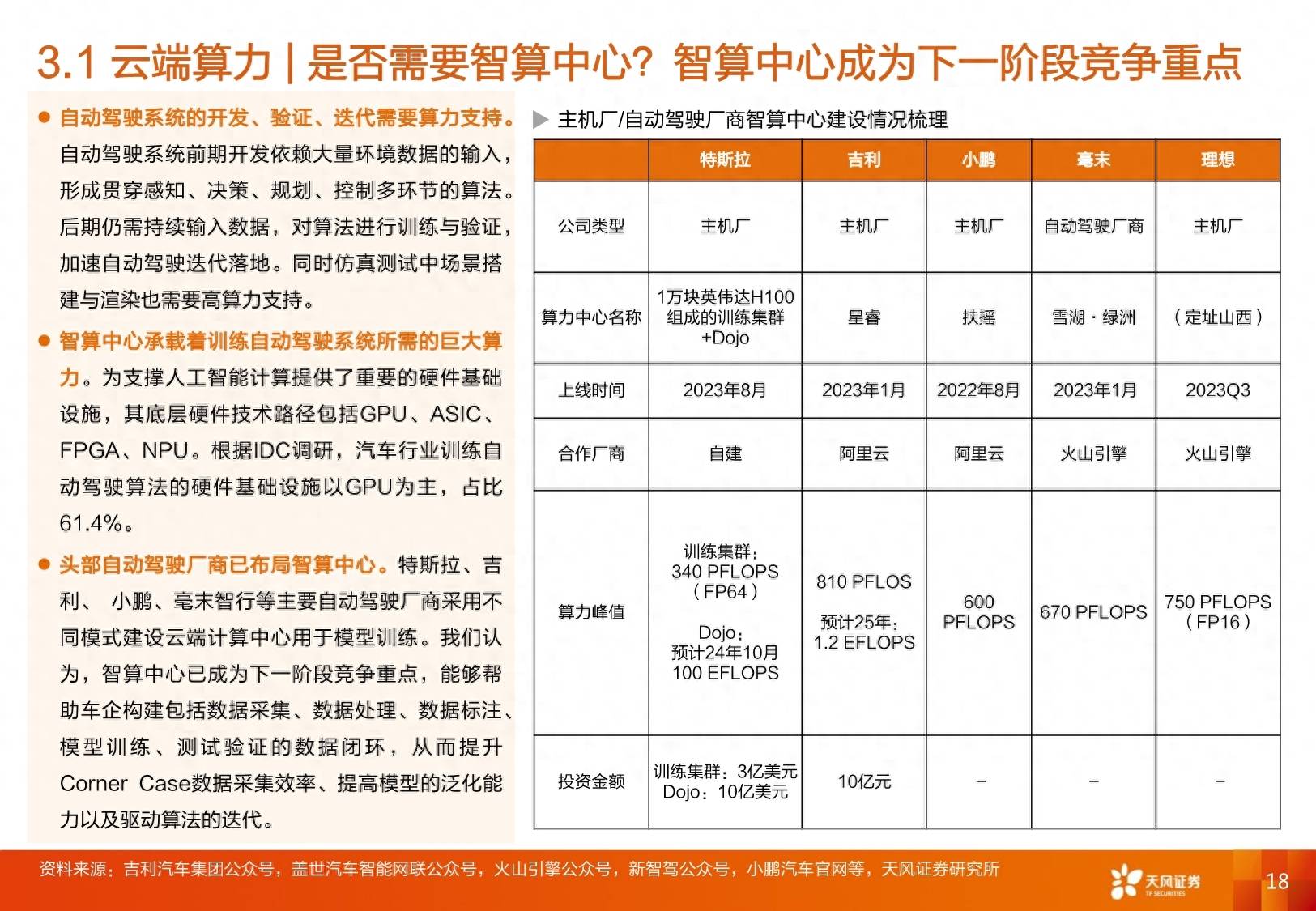
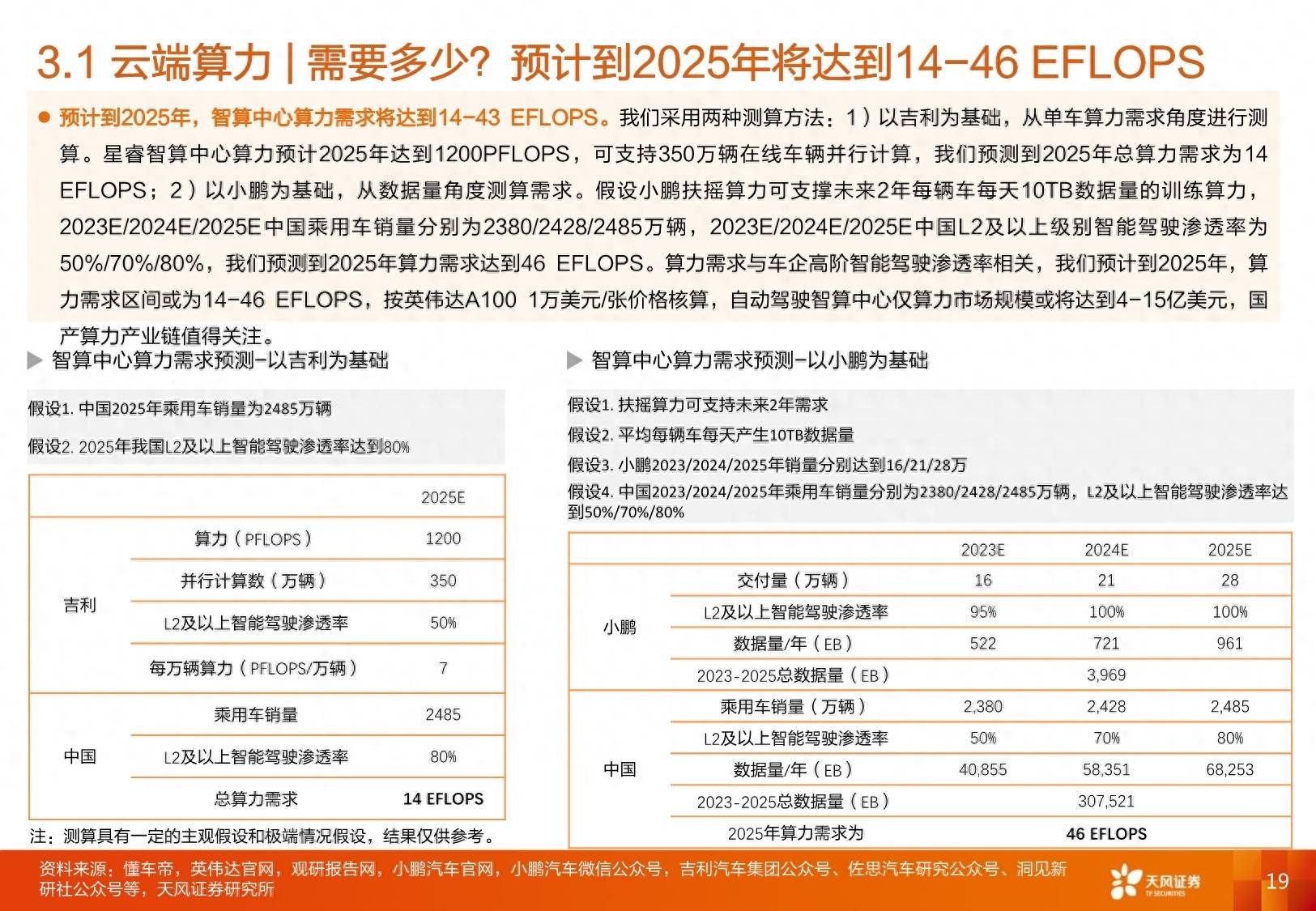
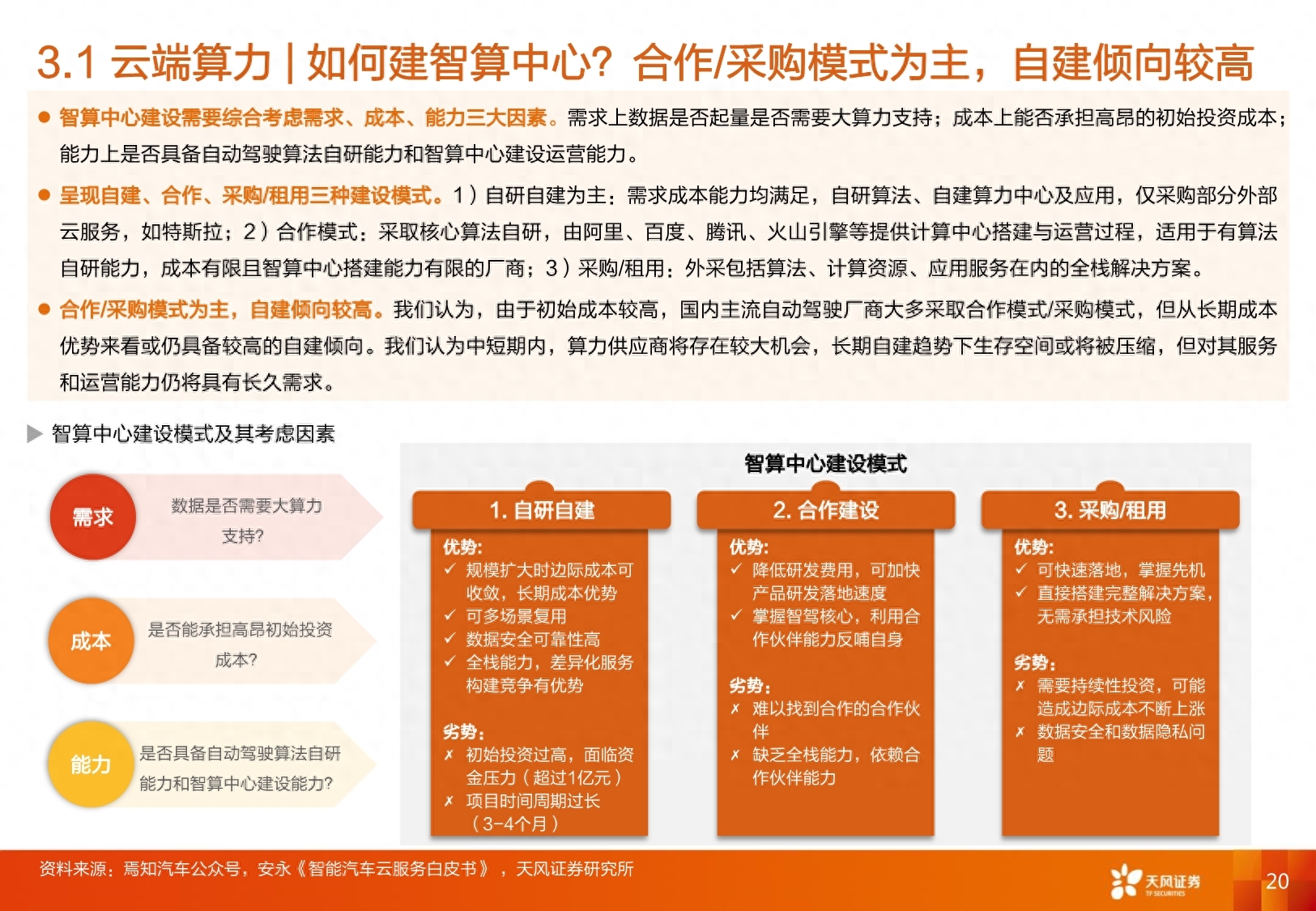
云端算力:智算中心承载这大模型训练与验证所需的算力支持,已经成为自动驾驶下一阶段竞争重点。我们预计到2025年,智算中心算力将达到14-46 EFLOPS,算力市场规模或将达到4-15亿美元,国产算力产业链值得关注。智算中心建设需要综合考虑 需求、成本、能力三大因素。
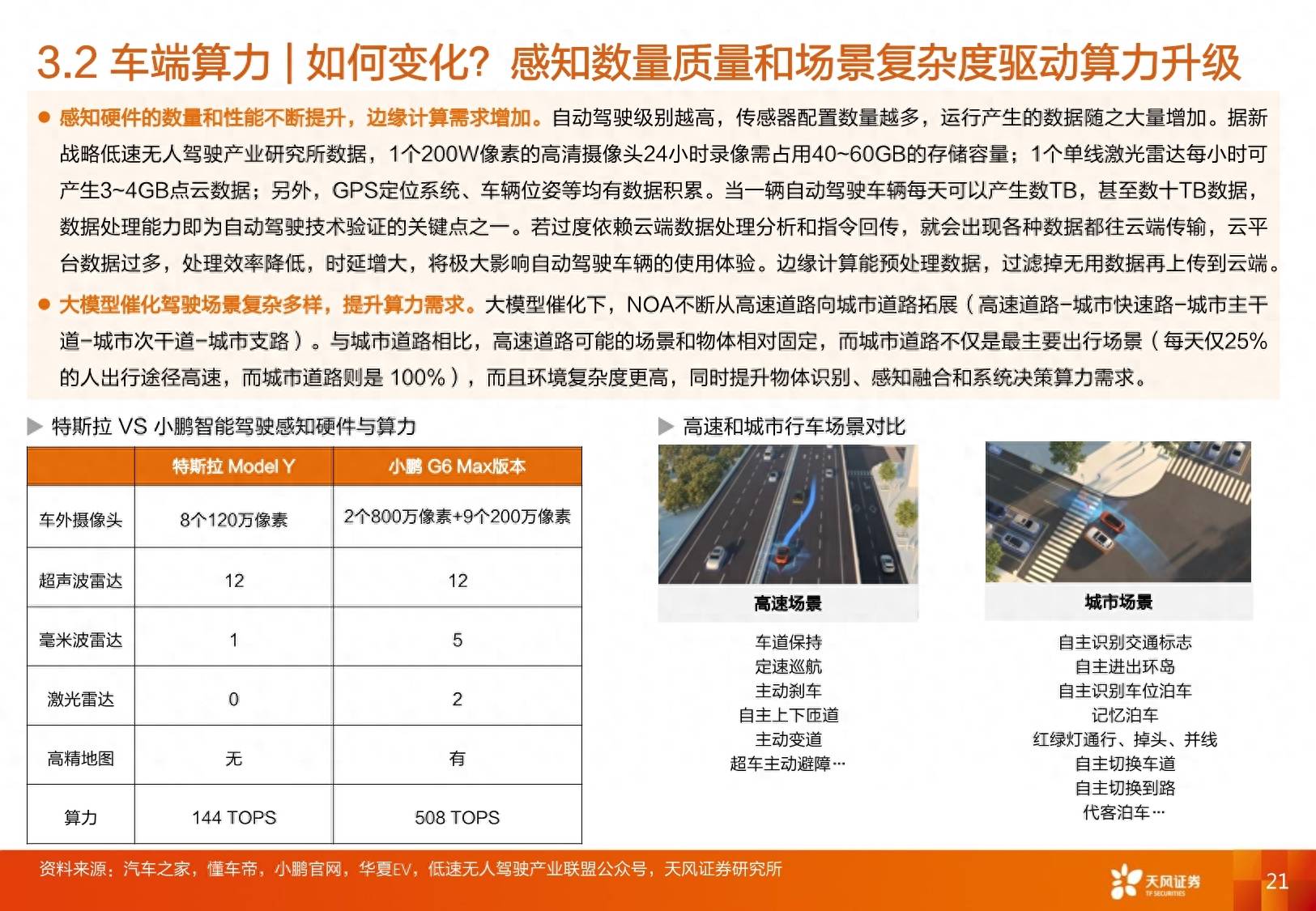
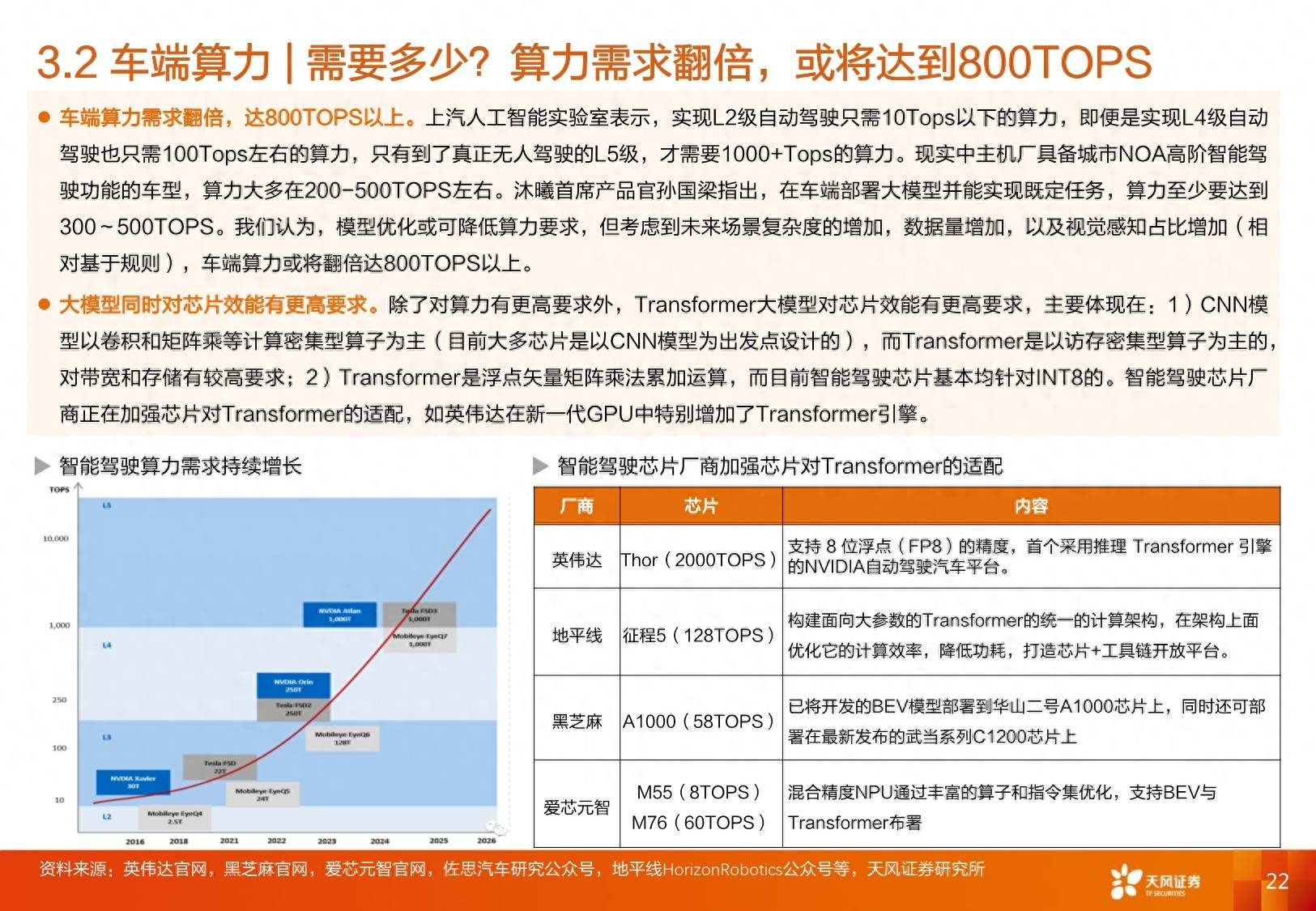
车端算力:需求翻倍或达800TOPS,算力提升原因主要在于:1)在感知硬件数量和性能不断提升,边缘计算需求增加;2)大 模型催化驾驶场景复杂化和多样化。同时对芯片效率能耗提出更高要求。
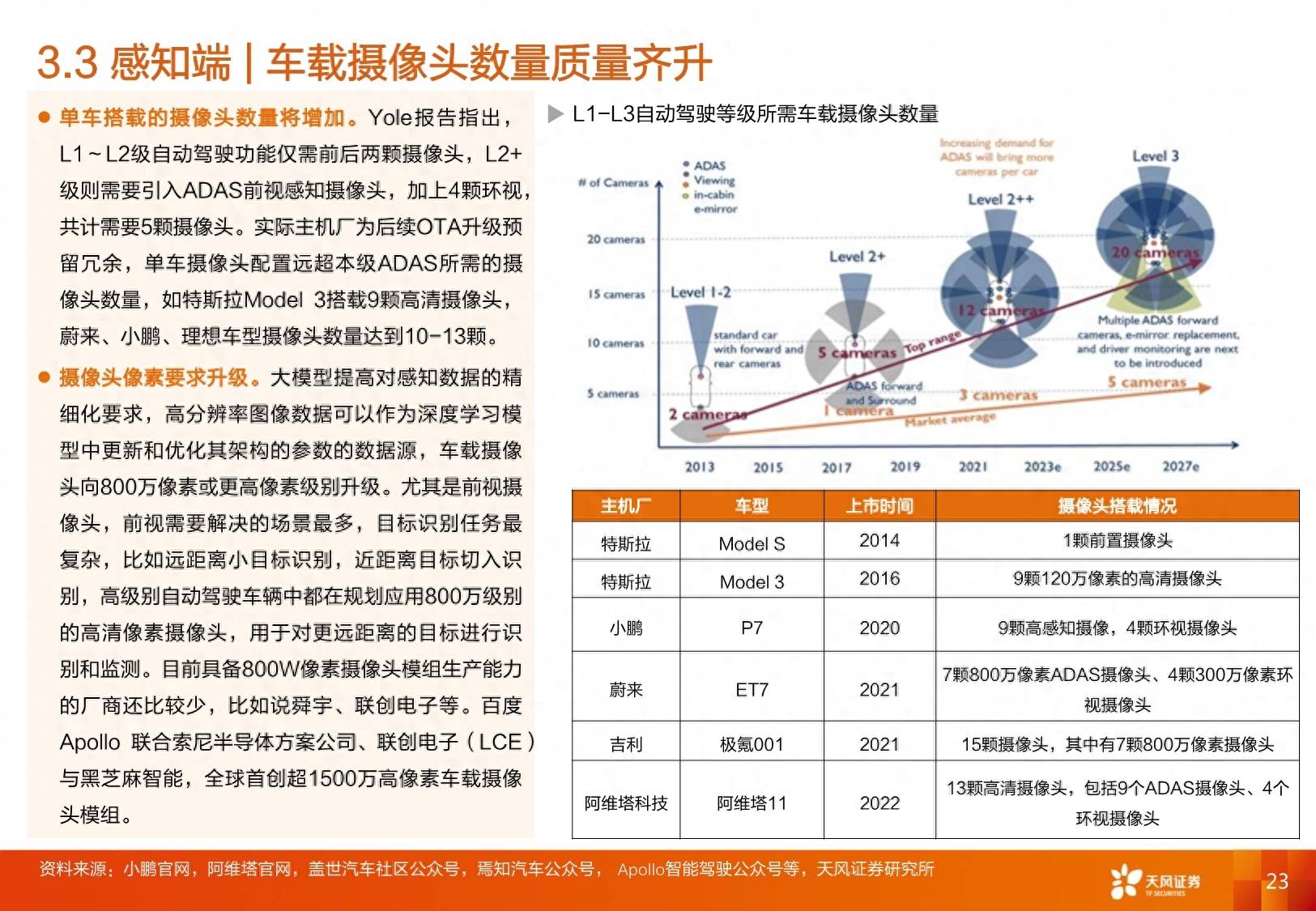
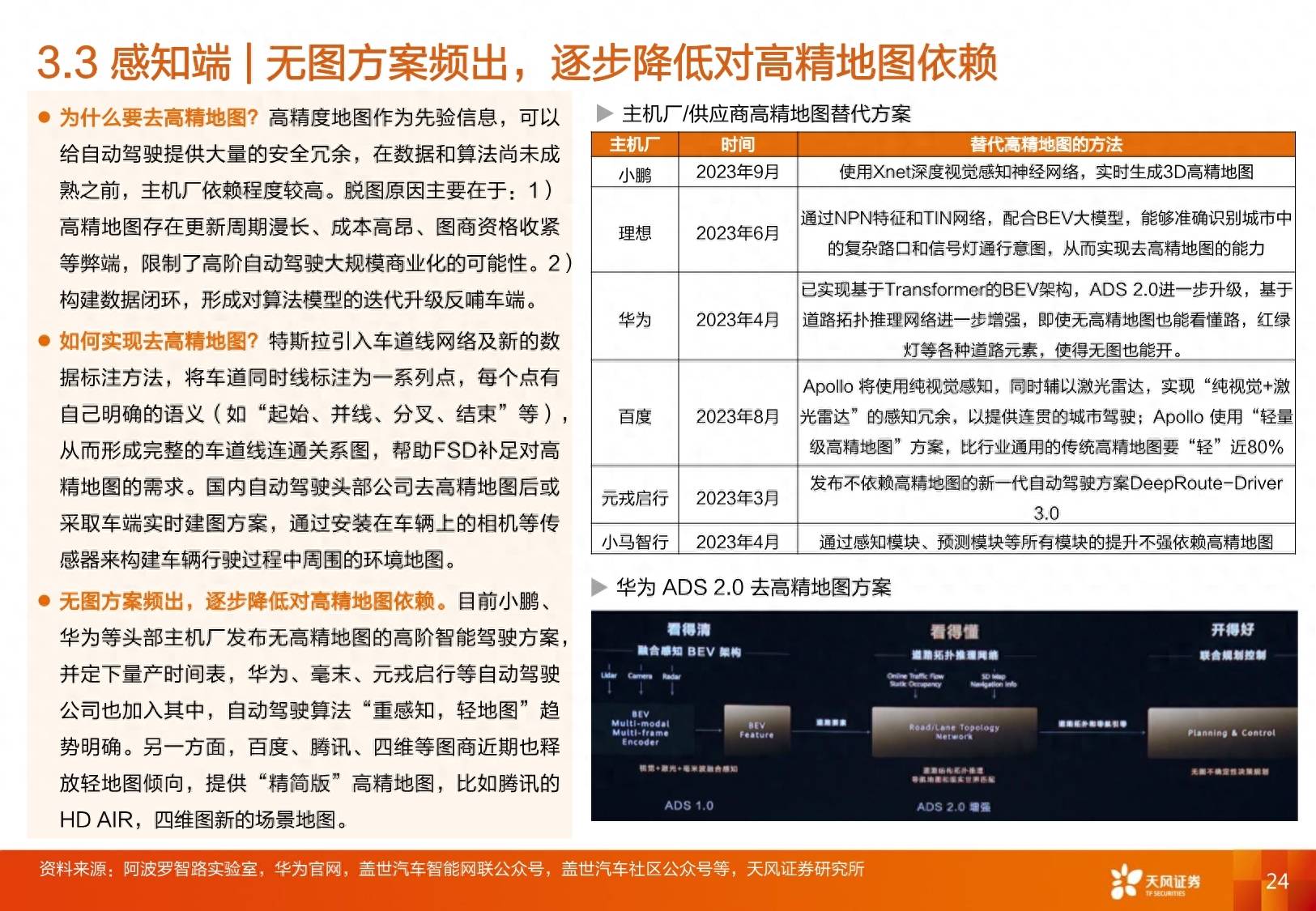
感知端:大模型对数据精度要求提升,单车搭载摄像头数量增加,像素从200万向800万升级。主机厂及自动驾驶厂商方案频出, 逐渐降低对高精地图依赖,或采取车端实时建图方案,通过安装在车辆上的相机等传感器来构建车辆行驶过程中周围的环境地 图。激光雷达逐渐降本趋势下,BEV+激光雷达可提供最大安全保障,因此仍将作为重要传感器需求量或将增加,但长期需求 或将见顶。4D成像毫米波雷达或将完全替代3D毫米波雷达,有望对低线激光雷达形成替代,或将在中高端车型及自动驾驶服 务车型中快速渗透。
执行端:高阶智能驾驶落地进行加快下,以线控结构替代机械式结构成为实现执行器多重安全冗余的必要条件,线控底盘重要 性凸显,有望加快线控底盘环节国产化进程,看好国产线控底盘零部件供应商崛起机会。
商业模式:伴随城市NOA逐渐落地,订阅模式开始兴起,消费者更偏好自由度更高的付费模式。订阅模式有望加快NOA功能渗 透,并进一步促进数据回收实现智能驾驶系统持续迭代。
报告出品方:天风证券
报告内容节选如下: